>>
Industry>>
Robotics>>
MIT’s new control vest t...MIT’s new control vest to help the heavy-lifting droids to keep balance
The Silicon Review
31 October, 2019
Author:
The Silicon Review Team
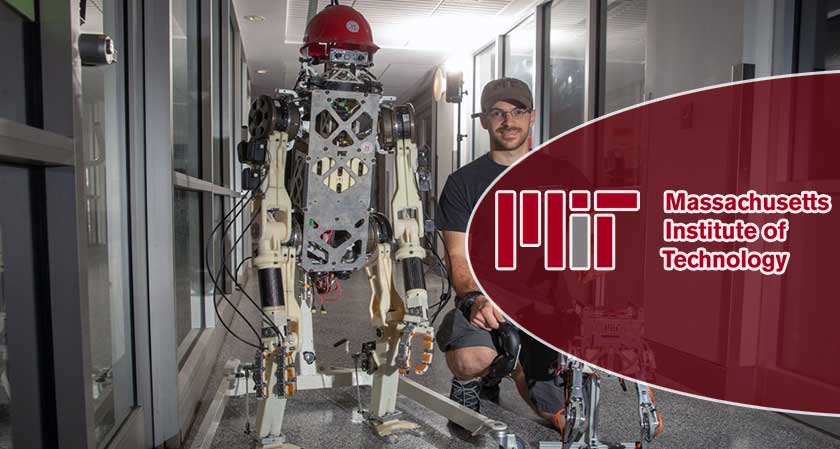
Engineers at MIT and the college of Illinois at Urbana-Champaignare on the verge of building up a teleoperated robot that has the utilization of special worked vest to give it a balance and reflexes similarly as people. It is given the name (HERMES) Little Highly Efficient Robotic Instrument and Electromechanical System, this bipedal robot is one- third of the size of a grown-up individual, and it can jump, run and move in a state of harmony with the administratorOne of the pressing issues is that despite the fact that robots can jump, run, and do somersaults, they are as yet not good with regards to balancing. what's more, in this manner to help these robots keep equalization and root themselves to deal with energetic activities, university of Illinois mechanical science and engineering at MIT developed little HERMES.
The key to Little HERMES is a constrained feedback mechanism. The operator wears a vest that not just makes the robot move in a state of harmony with the administrator, yet besides enables the administrator to feel the powers working its way with the robot and respond naturally – imparting the human feeling of balance with a machine.The key is a vest worn by the administrator that pushes and pulls as the robot loses its balance. In such conditions, the operator reflexively redresses, thus does the machine. This implies it can walk and remain with more confidence as well as prepare itself to push or utilize a tool.At present, Little HERMES works by direct wire control. However, the subsequent stage is to present remote control.